 Kinda what I am thinking
Kinda what I am thinkingRobs Stupid Radio Controlled Tank Page
This is Robs Stupid Radio Controlled Tank Page. It is Stupid.
Oct 30, 2013 I got tired of doing stuff I had to do and decided to make something fun
My lawnmower does an awesome job of moving large amounts of dirt, the 4 wheeler pushes dirt and snow around pretty well, but I still figured I needed another machine to move snow and dirt around, only smaller. It might as well be remote controlled
I bought some surplus zero turn lawnmower transaxles along with trailer spindles, some large tires and alot of chain and sprockets.
The transaxles are too wide to connect chains to each wheel without making it much wider than I wanted or doing some crazy intermediate shaft.
Im really not liking the way this turned out, but about the only way to get power to all 4 wheels without doing goofy stuff.
I was planning on using a 1000w electric motor to power the transaxles, but after realizing that the transaxles could output almost 5hp each, it was just silly to power them with a motor that could only output a smidgen over 1hp, and probably not for very long. I decided to go much bigger, and ended up getting a motor rated for 4hp continuous, and 12.8hp peak. Somehow I didnt realize how large this motor was
 Ginormous Motor for an RC vehicle
Ginormous Motor for an RC vehicle
Had a really hard time trying to find a place to mount the motor on the frame. Its basically too large to fit anywhere. It ended up here
 Motor sticks out past the frame
Motor sticks out past the frame
According to my ginormous wheeled battery charger, the motor is taking quite a bit over 200 amps at 12 volts just to spin the transaxle input pulleys in neutral. OUCH! That would be over 800 amps at 48 volts!! This had better go WAY down after the it has worked for a bit. 800 amps would drain 35AH battery in less than 3 minutes. Thats assuming that the batteries wouldnt just explode if asked to supply that much current for very long.
Dec 31, 2013 I had to modify all the wheel sprockets to move the chains farther from the frame, and change the way the sprockets mounted on the transaxles so that the chains wouldnt hit the motor. I didnt really have to do both sides, but like the idea of parts being interchangeable.
 Wheel sprockets modified and stuff
Wheel sprockets modified and stuff
You can see in the pic above that I got some super servos to control the levers on the transaxles that normally have long bars for the operator to drive the lawnmower. They seem plenty strong enough. Only time will tell.
Since the tank runs on 24 volts, Im using this to provide power to the RC radio receiver and servos. For some reason, it is way cheaper than a non RC power supply with the same ratings.
 Tiny little power supply for RC stuff
Tiny little power supply for RC stuff
The tensioner on the motor side is pretty cheesy and the chain only contacts the drive sprocket a little bit, it is gonna have to be redone, eventually, but I am too anxious to drive the stupid thing already
 Chain needs rerouting for better power transfer
Chain needs rerouting for better power transfer
I made a kinda tray to hold the batteries better. Now they can sit normal and battery cables are more accessible.
Since the drive sprocket for the battery side, (I dont know if there is a front or back yet), is on a weird place, the tensioner has to make the chain wrap around the wheel sprocket better. Its probably gonna kill efficiency a bit having the chain bend like that, but it should work fine.
The tensioner pivots on the bolt on the right that is welded to the frame, and the bolt on the left is welded to a plate that is connected to the bolt above that can be cranked down to pull the sprocket up to tighten the chain.
 Different view of the tensioner
Different view of the tensioner
Theres an issue though. The left bolt hits the rim, and the right one hits the tire.
Jan 11, 2014 I thought about firing up the tank and taking it for a drive, but decided to charge the batteries first. Im using a charger made for RC control cars which can charge all kinds of batteries. I was thinking it could charge 24 volt lead batteries, but it maxes out at 22v. NARF! Gonna take twice as long to charge since I gotta do each battery individually
First battery took 9.7AH (amp hours), and the second took 7.8AH. Good thing I charged them. They are 35AH batteries, so they were about a third discharged. I have charged them once shortly after buying them, and they have never had to move the tank around yet. Just spinning tires in the air a few times for a few minutes.
I got the tensioner slimmed down and got brave enough to take it for a drive. I was really scared because the RC controls havent had much testing, and if it were to go goofy, it weighs 300ish lbs and has 400 lbs of thrust, I may not be able to stop it. Watch the video and see what happens
The first test went pretty well, except for the sprockets on the transaxles slipping. The transaxle shafts are 1 inch with no keyway and just a set screw to secure it. The sprocket has a keyway. I should probably cut a keyway in the shaft, but will probably just weld the sprocket to the shaft.
First run actually had a bit over 9 minutes of run time for the motor. I am very curious to see how much power it used from the batteries. Im hoping it will be less than 10AH.
Jan 13,2014 I am pretty happy!! Batteries both took about 9.7AH to recharge. This is just over 1AH per minute, for about 65 amps average for the motor. Compare that to when I first tried the motor, it took over 200 amps to do nothing. I know it wasnt working very hard this time, mostly because the sprockets were splipping, but way better than 200 amps!
Eventually, I plan on having 4 batteries in a 2P2S configuration for 70AH at 24 volts. That should give me about an hour of run time per charge and each battery would only have to supply 32 amps instead of 65. Eventually I may try 48v that the motor is rated for, but 24 should be strong enough for now.
So, the next steps are to attach the sprockets better, and make a better tensioner for the other side. Even with the sprockets slipping, the chain still jumped a few times during the test run, and I figured I would have to redo it anyway.
Jan 14,2014 Finally got the motor side tensioner done. The bolt(s) have to push down on the idler, and only has one, nut may need one on the other side too.
Of course, the tensioner rubs the tire, Arggghh
The batteries Im using wont give me much run time, so I was looking to buy more batteries for more amp hour capacity and/or more voltage, and realized that I have a couple 22.2v 5AH LiPos that I bought for another project for $45 that I didnt end up using. Maybe Im having a brainfart, but these seem very similar in price to lead batteries.
The 2 batteries I have provide 24 volts at 35 amp hours and cost $240. If I were to have 7 of the LiPos, it would be 22 volts at 35 amp hours and would cost $350.
It would be an even better deal than that, because LiPos are rated for their capacity at a multiple of the AH rating, whereas lead batteries are rated at a 20 hour rate.
The lead batteries will supply 35AH at 1.75 amps for 20 hours, and the battery says on it that it will supply 25 amps for 54 minutes, which works out to 22.5AH. So at 1/2 Ohm (12V/25A), the lead acid battery wastes about 1/3rd of its power (35-22.5). At 100 amps, most of the power from the battery would be wasted and would probably supply less than 10AH at that rate. 5 of the LiPos in parallel would give me 25AH at up to 500amp rate (20C). 5 of the LiPos would be $250, the same price as the lead acid.
The best part is that 5 of the LiPos are actually rated to give me 500 amps, and the lead acid ones would be very sad and wear out really quick if I tried to get 500 amps out of them for very long. So 5 Lipos will give roughly same power as 2 lead and will survive longer at 100-300 amps.
Tried to buy 3 Lipos, but ended up getting 7 in my cart because the website was going goofy. I bought all 7 anyway, which will give me 45AH with the 2 I already have and will stack 3x3 and make a nice compact 6" cube that will fit nicely next to the motor, and be able to supply 900 amps if I get that crazy!
This will be awesome in even more ways than I thought. I was going to put the other 2 lead batteries widthwise next to the other batteries, and I was worried where I was gonna fit the motor for the lift arms for the plow and bucket. Now that area will be empty. Even better, my charger can do 22.4v LiPos in one shot, instead of having to hook up charger to each lead battery and charge twice.
I cant hook the lead batteries in parallel to the LiPos, since they are slightly different voltages, and have very different charging requirements. The lead batteries wont go to waste though, they will be hooked in parallel to run an onboard Linux computer/Arduino combo like my other robots. I will probably use a Udoo this time.
Enough about batteries. It runs! Woohoo!
The radio quit working at the end and I had to turn off the motor power to make it stop. Good thing it was mostly stopped! Even after turning the motor off and power cycling the radio power supply, there was no light on the receiver, and the servos wouldnt move at all. Bummer. It was still awesome though
Jan 16,2014 Checking the radio last night revealed no problems. Works perfectly again. Not sure why it stopped working. Loose wire, overheated radio power supply? I dont know. Pretty scary
2nd test run was about 4.5 minutes and the 2 12v batteries took 8.299 and 8.216 for an average of 8.2575 amps to charge. So 1/13.3 of an hour runtime equals a smidgen over 110 amps average. It was working alot harder this time, so thats mostly expected. It takes alot of power to spin in place that it wasnt capable of doing before.
Jan 21,2014 The batteries finally got here, along with some connectors. Took awhile to charge them all, and gonna take even longer to solder them all together
In the meantime, I decided to see how much the beast weighs so far.
The LiPo batteries weigh about a pound and a half each, so will add about another 15 lbs. The frame needs gobs more reinfocement, so it will surely be well over 300lbs, or maybe closer to 350 when it it complete
I got one of the 3 battery packs soldered together. I dont like it. The wires are too hard to solder well and ended up being pretty woosy towards the connector. Ordered some big barrier strips to wire them up instead.
 Wires turned out retarded. Not doing it this way
Wires turned out retarded. Not doing it this way
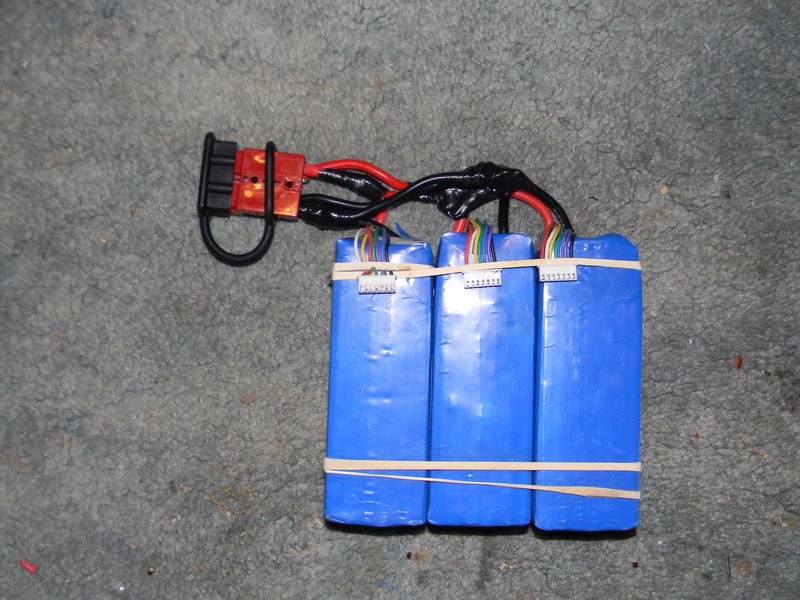
Jan 27, 2014 I got parts today! Now I can make the other battery modules. Too bad this is even more retarded than the first one. It was easier to make, but seemed very dangerous if the connections werent perfect. It looks alot like a bomb though. Imagine 3 of these connected together.
 Turned out even more retarded than first one.
Turned out even more retarded than first one.
 At least the part that couples the 3 modules worked better
At least the part that couples the 3 modules worked better
Eventually I will get around to installing the LiPos in the machine, but wanted to get voltage and current readings with the lead acid batteries first. I hooked voltmeter probes into a 4 gauge motor wire about 12.07 inches apart that should be about 1/4 of a milliohm, to give readings of 1/4 of a volt per amp.
Turns out, the motor only takes about 115 amps to startup in neutral, and drops to 80 amps after 15 seconds, and drops below 50 amps after 3 minutes. The sad part is that the deep cycle batteries dropped from 25.8 volts to 20.0 at 100 amps, and was still only 22.3 volts at 50 amps. Thats even woosier than I thought and alot of wasted power. Thats a tad under 1/4 of the power wasted at 100 amps doing nothing. Probably waste nearly half the power at 300 amps.
Here is a stupid graph of the battery voltage and how much it dropped at various motor amps on startup for the first 90 seconds
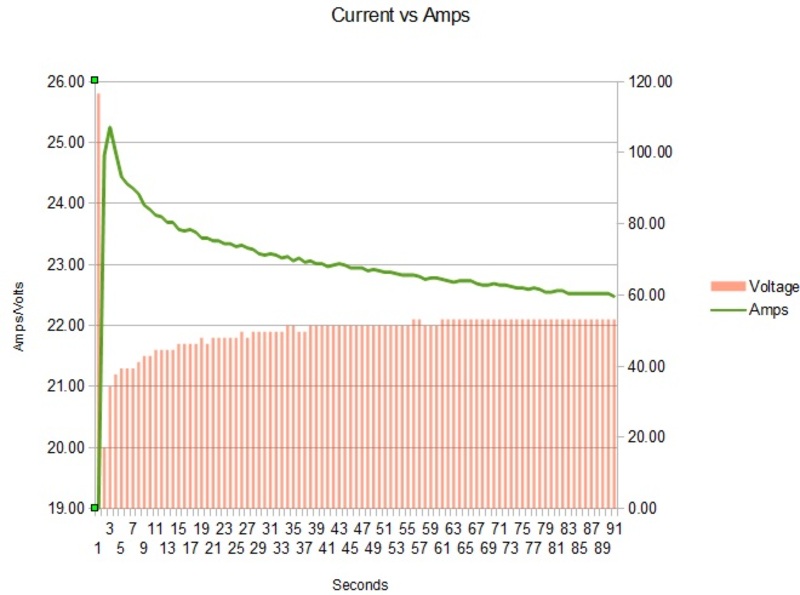 Stupid graph of Lead battery Amps/Volts
Stupid graph of Lead battery Amps/Volts
Lead batteries took x.xx and x.xx AH to recharge after its 4 minute startup, for AH/hr average of xx.xx.
I doubt the LiPos will waste nearly as much power, and Im starting to be glad I decided to use them, even though it has been a huge sidetrack to my project.
I finally got the machine end of the power connection made. Too cold right now to install it though.
Got new power connector installed and decide to test some LiPos. I only used 1 of the 3 pack modules, and was still very pleasantly suprised. The Lipo battery only dropped a bit over a volt at 103 amps, where the lead acid battery dropped almost 6 volts at roughly the same load. This is from a battery pack that is a bit over 1/3 the capacity of the lead battery it is being compared to (15AH vs 35AH)
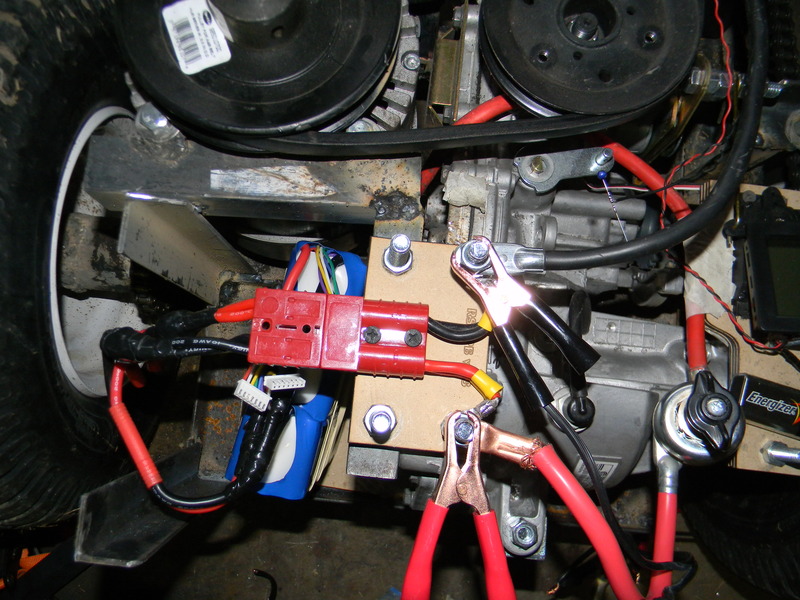 Tiny little LiPo about to be compared to lead battery
Tiny little LiPo about to be compared to lead battery
A big portion of the volt drop could actually be from the battery wiring. The single wires at the end of the battery module started getting slightly above room temperature warm. Having 2 or 3 of the modules would make this much better.
Also of note is that this is the first time these batteries have seen a load, and LiPos are supposedly known to not develop their best efficiency until after they have been cycled half a dozen times or so. Did I mention Im very happy?
LiPos took 4.190AH to recharge after its 4 minute startup, for an average of 62.85 amps, which is very close to what I measured going out. LiPos do seem to be alot more efficient. Thats 98.4WH (4.19A * 23.5V), as in nearly same power as running a 100W bulb for an hour to make the machine do nothing for 4 minutes.
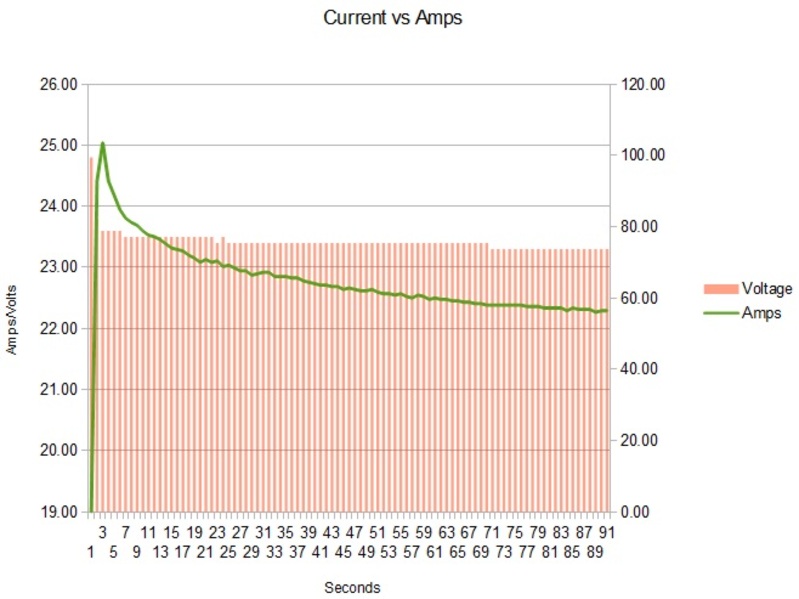 Stupid graph of LiPo battery Amps/Volts
Stupid graph of LiPo battery Amps/Volts
Feb 04, 2014 Barrier strip on the battery was easy to do, but too much potential for catastrophic failure. Wires on the soldered one got warmer than I would like in the single strand near the connector. Connector was kinda undersized anyway. Third battery pack got 2 sets of wires and a bigger connector. huge pain to solder, but gonna be worth it in the end.
 Third battery pack with bigger wires
Third battery pack with bigger wires
Feb 13, 2014 Finally got some time to work on the machine. Got the frame looking like a cube instead of a flat plate.
 Frame coming together, but Dohhh!
Frame coming together, but Dohhh!
Too bad I made the area for the lead batteries too small! Had to cut out that piece and move it.
The straps in the previous picture were to weigh the machine. It weighs 286lbs now.
Feb 17, 2014 I didnt realize that one of the tires was flat when I was boxing in the frame. The frame was fairly flexible before, now it is stuck in a way that makes it teeter on 2 wheels now that I put air in the tire.
Had to cut the frame most of the way through in about a dozen places to enable bending it back flat. Even then, had to use alot of weight to get it straightened out. Thats a 5 gallon bucket full of steel scrap, and a shovel with a power steering box from a mid 70s Ford truck on the other end.
Woohoo, all 4 tires can touch the ground at the same time again!
The battery pack that had the barrier strips has been modified to have 2 sets of wires going to a gnarly winch connector like the 3rd pack. As soon as I modify the first one and add 2 more connectors to the machine, I can start doing fun stuff again.
Mar 03, 2014 I have been doing fun stuff, just nothing that is very noteworthy. I did take a small eternity to decide how I was gonna control this thing. It was a no-brainer that I would use WiFi to communicate between the remote and the machine, but hadnt really ironed out all the details of how the data would flow, or which computers I would use to control it.
My initial idea was to use the Udoo onboard the machine, and a Raspberry Pi to talk directly from remote to machine. While being very cheap, the Raspberry Pi doesnt have much CPU power, dont have any analog inputs (for joysticks), and I never could get the WiFi to work correctly. Raspberry Pis are off the island.
The bar in my basement has become the place to test new hardware. I had a couple Raspberry Pis hooked up there for awhile to see what they could do. For the price, I was very impressed. I ended up using one to make a very simple friend for my Rock Band playing robot Boner, but beyond that, not very useful. Issues with WiFi and no analog inputs prevents them from being as useful as I thought they would be.
I thought for awhile about replacing the laptop that controls the music in the bar with a Raspberry Pi. Mostly to save space and energy, since the laptop is tucked away, it is a pain to turn on or off, and so it nearly always gets left on. The GUI for the music controller was written in flash and is a SWF. The Raspberry Pi would run the SWF, but was VERY VERY slow. I made a mostly operational version of the music controller in JavaScript, and the Pi was still painfully slow.
Playing with a Udoo in the same environment proved to be much more useful. The WiFi works after clicking some options on the GUI, and has gobs of programmable inputs and outputs, and is fast enough to replace the laptop.
In between thinking about replacing the laptop, and pairing a Udoo with a portable screen for the remote, it occurred to me that if I replaced the laptop with a Udoo, then the laptop could replace a tablet that has been annoying the wife for sometime. If I used the tablet for the remote, then I wouldnt have to buy a screen for the Udoo to have a remote and the wife is thrilled with the idea of the tablet going away.
While the tablet will save me money for a screen, and time designing a case for it, there arent any analog inputs, and I refuse to go through the hassle to make an Android app. The only option is to make a web page that can take mutiple touch inputs from the screen and use them in a real time and meaningful way to enable touch screen support for the controls. Got that done, now its on!
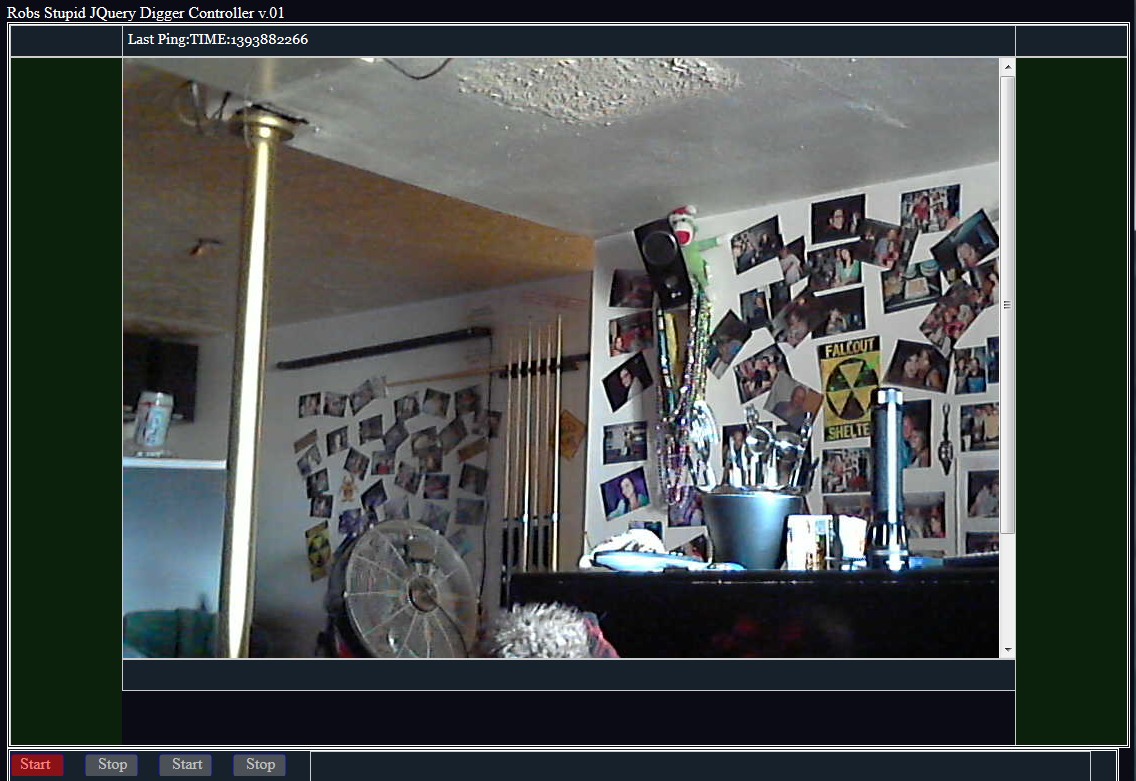 Stupid JavaScript web page with dual touch sliders and live video feed!
Stupid JavaScript web page with dual touch sliders and live video feed!
The green vertical areas on the sides of the screen are the touch areas for driving. There will be other pages to control different combinations of things, but this page was mostly just a proof of concept for the multi-touch in a webpage thing, but has a 1 second ping and a variable refresh time live, flicker free, video feed. Im pretty happy!
I have been spending alot of time working on the programs required to make this stupid thing work. There are 4 layers of programs to communicate from the remote to diggers hardware. At the lowest level there is the Arduino part of the Udoo that run the servos that control the hydrostatic drives. Controlling that is the Arm CPU part of the Udoo running Linux. The Linux part talks to the rest of the network through a server. A tablet running over WiFi talks to the server.
The Arduino programs are written in Wiring language, the Arm runs a daemon written in C, The server runs PHP and C, and the tablet runs JavaScript and JQuery. Piece of cake.
The video feed is actually from Boobys camera right now. Digger doesnt have his own camera yet. The ping doesnt make it through all the layers yet, and I havent actually wired up the servos to see if they work. Other than that, the software is operational :)
See the buggy I built with a Subaru motor
See my other carts I have built
 Maybe something like this
Maybe something like this Gotta be something like this
Gotta be something like this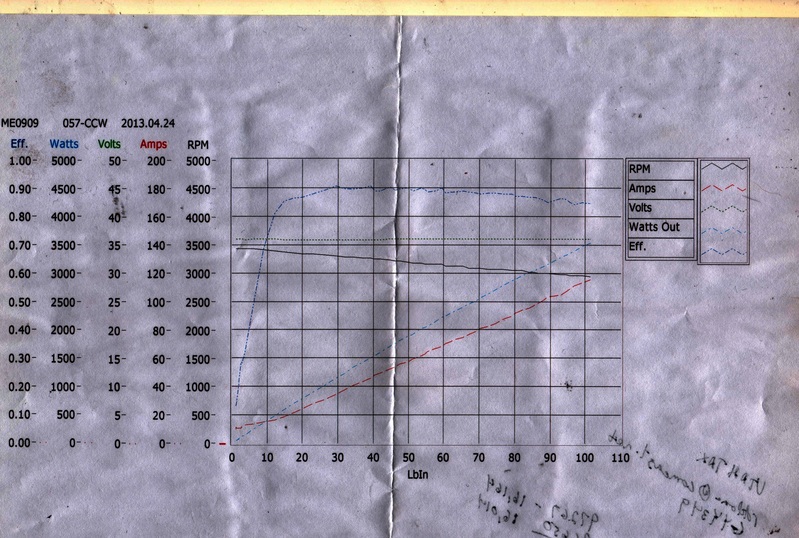 Ginormous Motor Specs
Ginormous Motor Specs Batteries fit alot better
Batteries fit alot better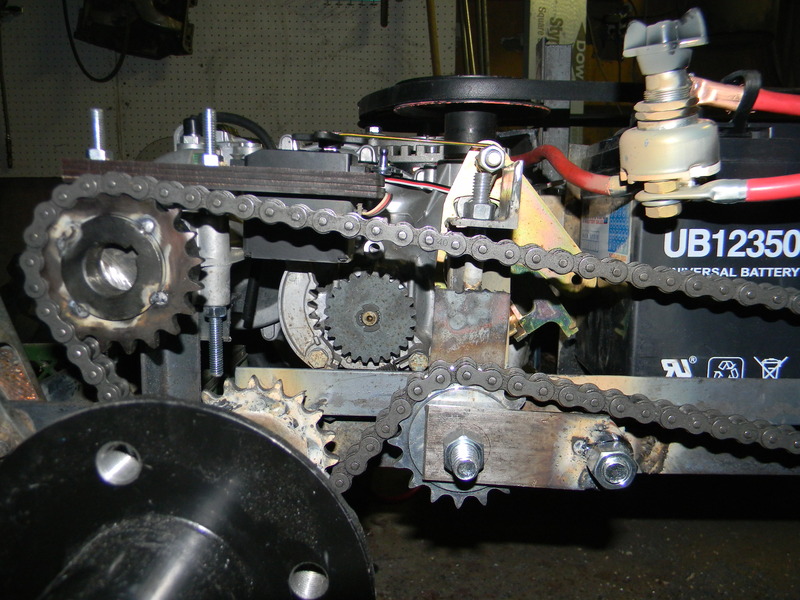 Stupid little tensioner
Stupid little tensioner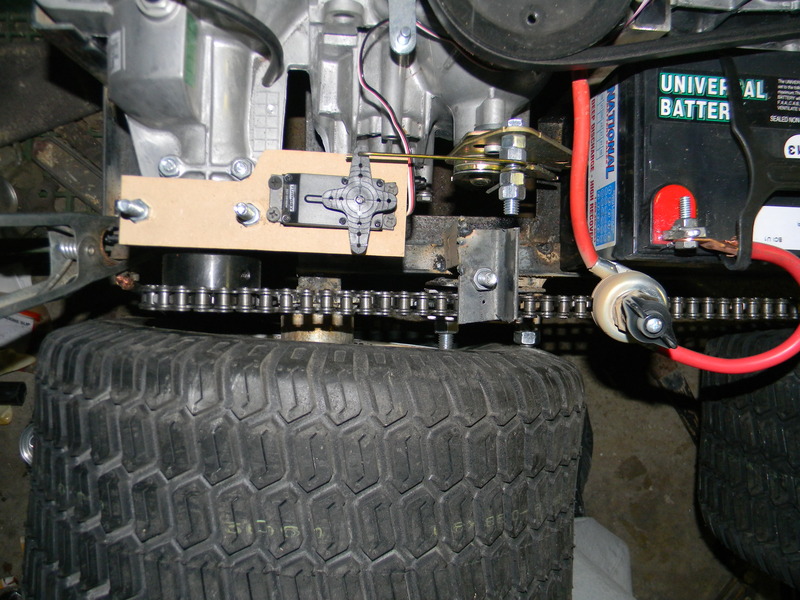 Tensioner hitting stuff
Tensioner hitting stuff Motor side tensioner
Motor side tensioner Closeup
Closeup Tensioner trimmed down
Tensioner trimmed down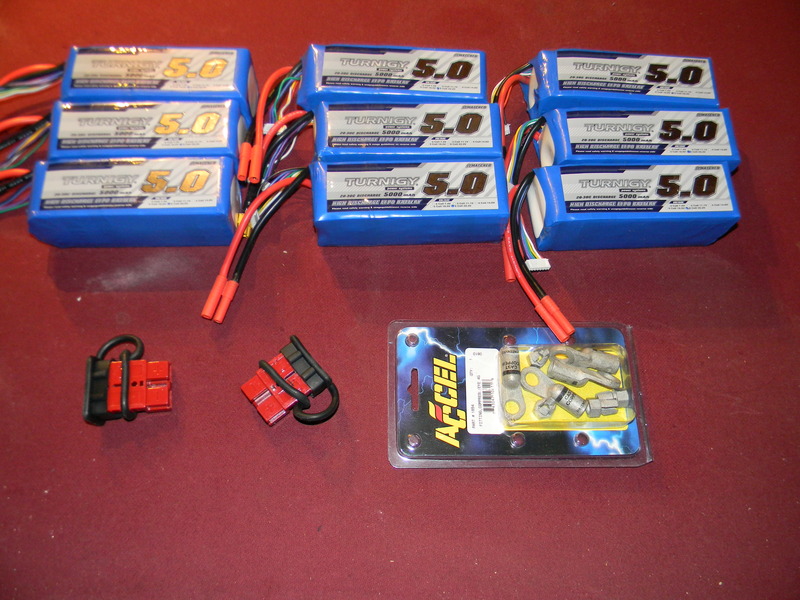 Woohoo, power parts
Woohoo, power parts It weighs 263lbs so far
It weighs 263lbs so far Power Connector
Power Connector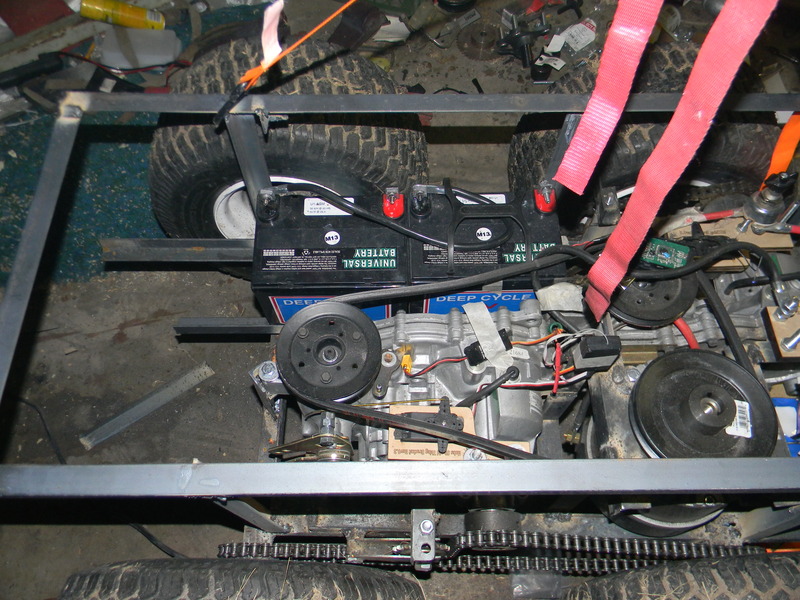 Moved the frame piece
Moved the frame piece Hows that for stupid?
Hows that for stupid? Stupid Flowchart
Stupid Flowchart
Leave a Comment